Het Mobile Servicing System (MSS) is een bestuurbare robot die aan het ISS ruimtestation bevestigd werd. Hiermee kunnen de bemanningsleden van het ISS zowel onderhoudswerken met uitvoeren aan het ruimtestation als ook wetenschappelijk werk met verrichten. Deze MSS bestaat uit een Mobile Base, de Space Station Remote Manipulator en de Special Purpose Dexterous Manipulator die elk apart aan het ISS gemonteerd werden en samen één geheel vormen.
Dit systeem werd ontwikkeld en gebouwd door het Amerikaanse bedrijf MDA Space Missions, die eerder al de "Canadarm" robotarm voor het ruimteveer ontwikkelde. De ontwikkeling van de MSS gebeurde in opdracht van het Canadese ruimtevaartagentschap CSA die hiermee haar steentje bijdraagt aan de bouw van het internationaal ruimtestation. Tijdens de STS-100 ruimteveer missie in april 2001 werd het eerste component van de Mobile Servicing System in de ruimte gebracht en gemonteerd aan het ISS ruimtestation waardoor de ruimtevaarders aan boord van het ISS nu ook werk aan het ISS konden verrichten zonder dat ze daarvoor risicovolle ruimtewandelingen moesten maken.

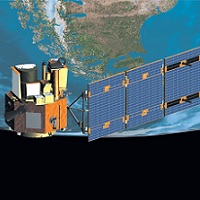
De Space Station Remote Manipulator gemonteerd aan de Destiny module
van het ISS - Foto: NASA
De Space Station Remote Manipulator wordt ook wel 'Canadarm 2' genoemd en is een 17,6 meter lange robotarm die een gewicht heeft van 1,8 ton. Dit systeem bestaat uit 7 gemotoriseerde scharnierpunten waaraan verschillende camera’s gemonteerd werden zodat de crew in het ruimtestation en in het vluchtleidingscentrum elke beweging op de voet kan volgen. De robotarm heeft een diameter van 35 centimeter en kan in de ruimte vrachten tot 116 ton op en neer tillen waardoor het een zeer belangrijke functie krijgt in de verdere bouw van het ruimtestation. Een enorm voordeel aan dit systeem is dat deze zich over de hele lengte van het ruimtestation kan verplaatsen door middel van een mobiel platform dat de 'Mobile Base' heet. Het hele gevaarte wordt bestuurd door één van de bemanningsleden in het ISS die alle bewegingen van deze robot nauw volgen op één van de vele LCD schermen die deel uitmaken van de Robotic Work Station. Wanneer het ISS ruimtestation volledig zal klaar zijn zal zich een Robotic Work Station bevinden in het Amerikaanse ruimtelabo Destiny en een tweede in de Cupola module.

Astronaut Leroy Chiao bediend de robotarm aan de Robotic Work Station - Foto: NASA
De Special Purpose Dexterous Manipulator kan men vergelijken met een hand die gemonteerd wordt op de robotarm van het Space Station Remote Manipulator. Deze bestaat uit twee kleinere robots die in staat zijn heel nauwkeurig werk te verrichten doordat ze elk bestaan uit zeven gemotoriseerde scharnierpunten. Op deze manier kunnen de bemanningsleden aan boord van het ISS hun collega's buiten het complex helpen tijdens delicate ruimtewandelingen. Dit onderdeel werd eveneens uitvoerig getest in faciliteiten van het Canadese ruimtevaartagentschap en werd in maart 2008 aan het Mobile Servicing System gemonteerd tijdens de STS-123 Space Shuttle missie.